|
||||
| Nachrichten und Informationen zu Test- und Messtechnik für Elektronik in Entwicklung, Produktion und Service. | ||||

HauptmenüNewsletter abonnierenNews-BereichInfo-BereichWeblinksMarktübersichten |

Top 5 News der letzten 30 Tage
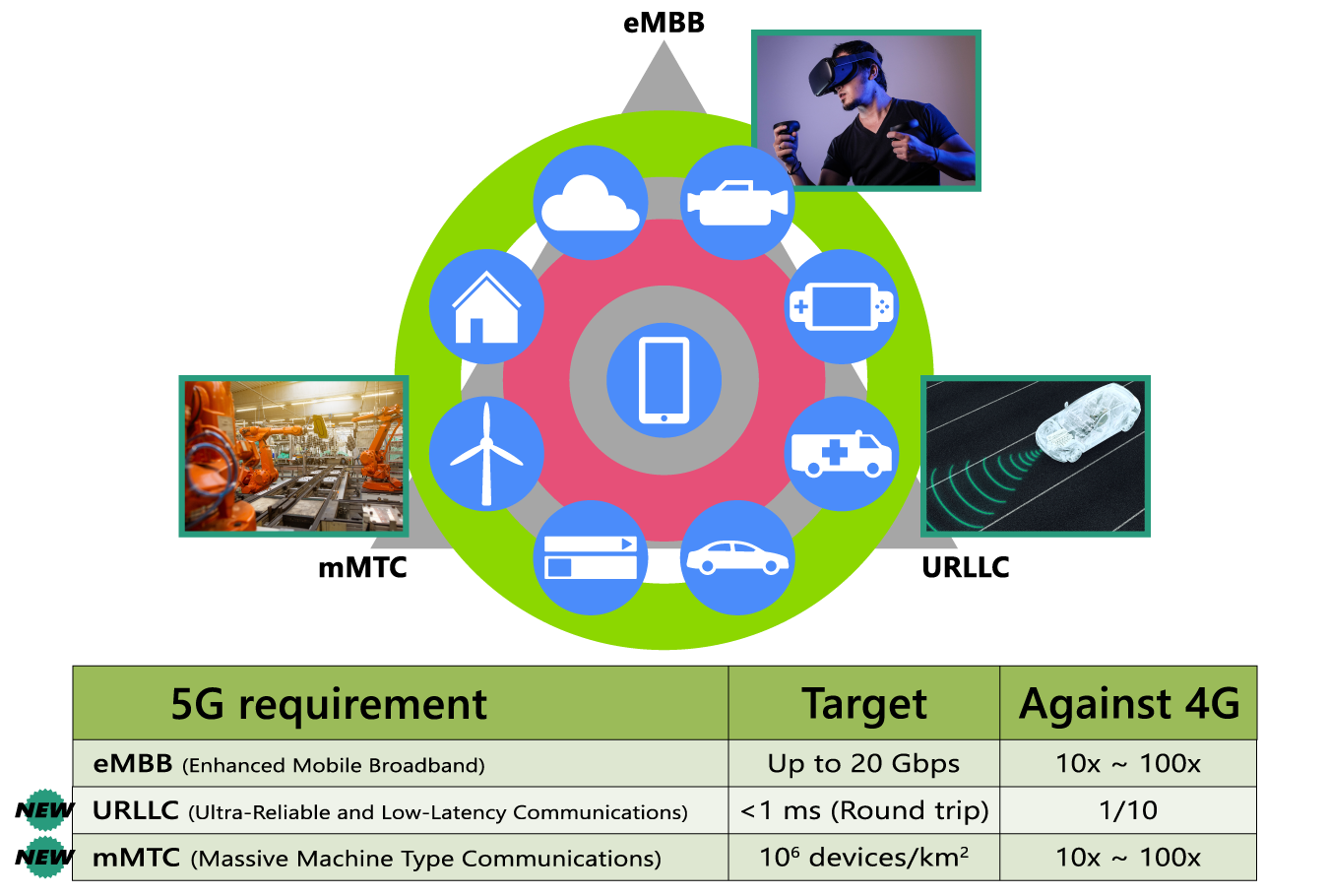
News - Baugruppen- und System-TestHintergrund: Synchronisierung von Frequenz, Phase und Zeit bei 5G messenDie Entwicklung der 5G-Kommunikation markiert einen Wendepunkt: jetzt können Kommunikationsnetze den Datenverkehr entsprechend ihrer Priorität und Bandbreitenanforderungen behandeln. Sicherheitskritische Anwendungen wie autonomes Fahren oder Roboter benötigen eine höchst zuverlässige Quasi-Echtzeit-Kommunikation, während bei anderen Anwendungen wie z. B. SMS und E-Mail gewisse Verzögerungen akzeptabel sind. Zwischen diesen beiden Bereichen gibt es etliche Anwendungen mit unterschiedlichen Anforderungen an Latenzzeiten, Bandbreite und garantierten Diensten. Dies ist auch mit neuen Testherausforderungen verbunden. Die Verwaltung von Synchronität, Zeit, Frequenz und Phase zählt zu den kritischsten Anforderungen, um eine korrekte Funktion des Netzwerks sicherzustellen.
Bild 1 - 5G-Anwendungskategorien
Es gibt drei Hauptkategorien für den Datenverkehr, wobei jede Anwendung eine andere Unterstützung erfordert:
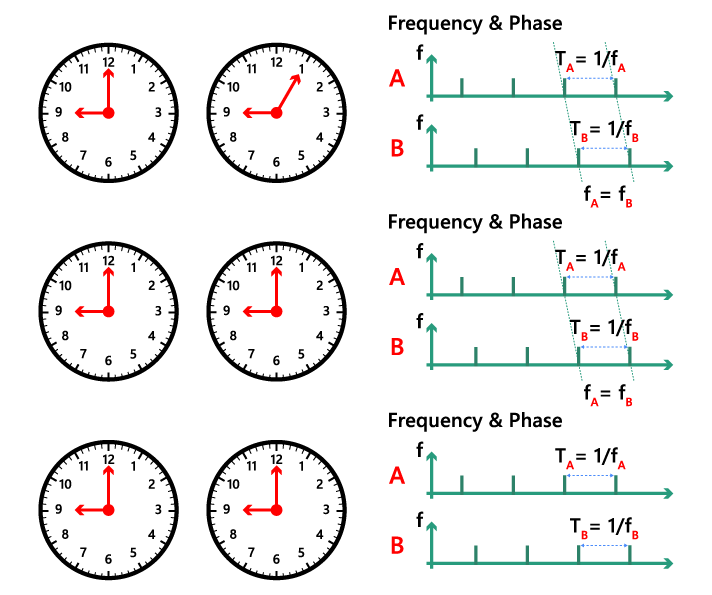
Bild 2 - Zeit, Frequenz und Phase
Bild 2 zeigt drei Beispiele für die Beziehung zwischen Zeit, Frequenz und Phase von zwei Uhren A und B. In jedem der Fälle messen beide Uhren den Zeitablauf mit der gleichen Taktrate, so dass die Frequenz synchronisiert ist. Im oberen Beispiel zeigen die beiden Uhren eine unterschiedliche Zeit an, und im entsprechenden „Frequenz- und Phasendiagramm“ auf der rechten Seite gibt es eine Phasenverzögerung zwischen A und B. Während der Zeitverlauf bei beiden Uhren aufgrund der Frequenzsynchronisation korrekt ist, stimmen die angezeigten Zeiten wegen der fehlenden Zeitsynchronisation nicht überein. Im mittleren Beispiel stimmen die Zeiten der Uhren A und B überein, aber es besteht immer noch ein Phasenfehler zwischen den beiden Uhren. Die Sekunden sind deshalb noch nicht synchron. Damit das Kommunikationsnetz korrekt funktioniert und das für URLLC geforderte garantierte Dienstniveau bietet, müssen bestimmte Vorgänge genau zum richtigen Zeitpunkt ablaufen. Daher müssen sowohl Zeit als auch Frequenz und Phase synchronisiert werden, wie im dritten Beispiel gezeigt. Die meisten Backhaul-Mobilfunknetze nutzen eine Kombination aus Synchronous Ethernet (Sync E) und IEEE 1588 Precision Time Protocol (PTP) zur Verwaltung der Synchronisierung von Frequenz, Zeit und Phase. Sync ESync E ist im ITU-T G.8261 Standard für Timing- und Synchronisationsaspekte in Paketnetzen definiert. Er beschreibt die Anforderungen für die Übertragung eines Taktsignals, das sich auf einen externen Taktstandard zurückführen lässt, zusammen mit den Daten über das Ethernet Physical Layer.
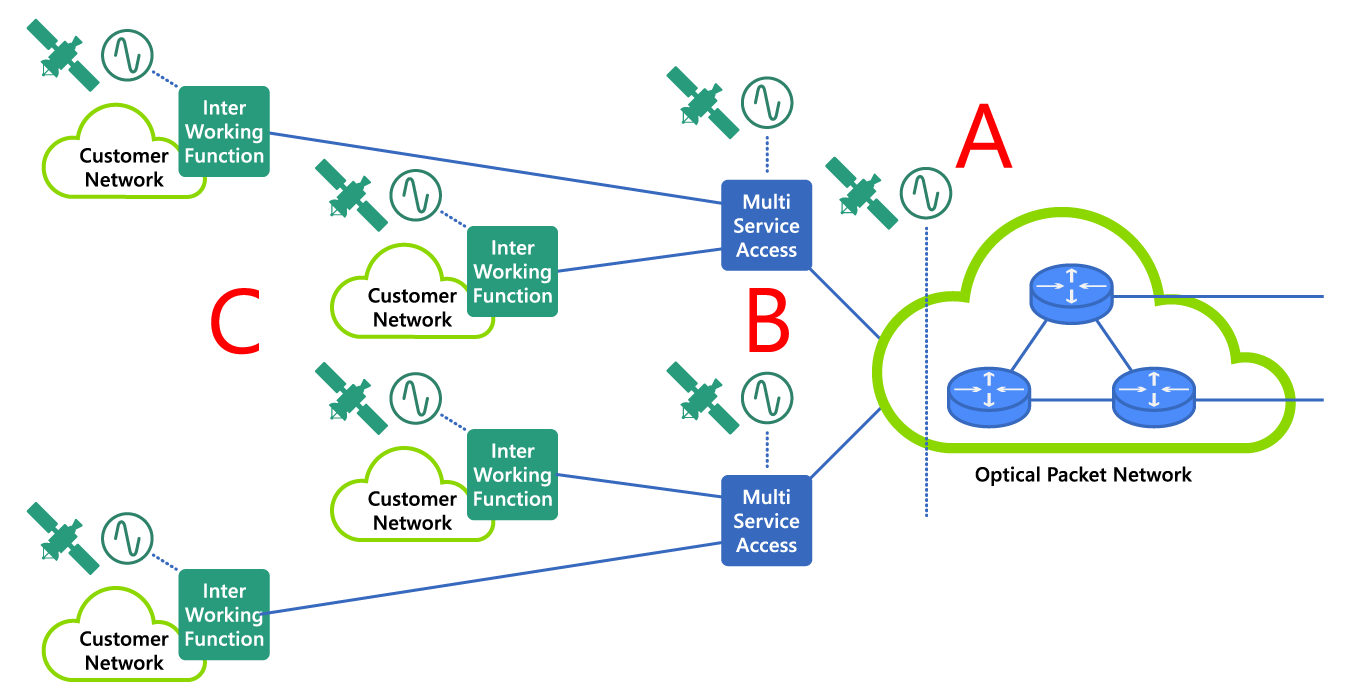
Bild 3 - Beispiel für eine Sync-E-Netzwerktopologie
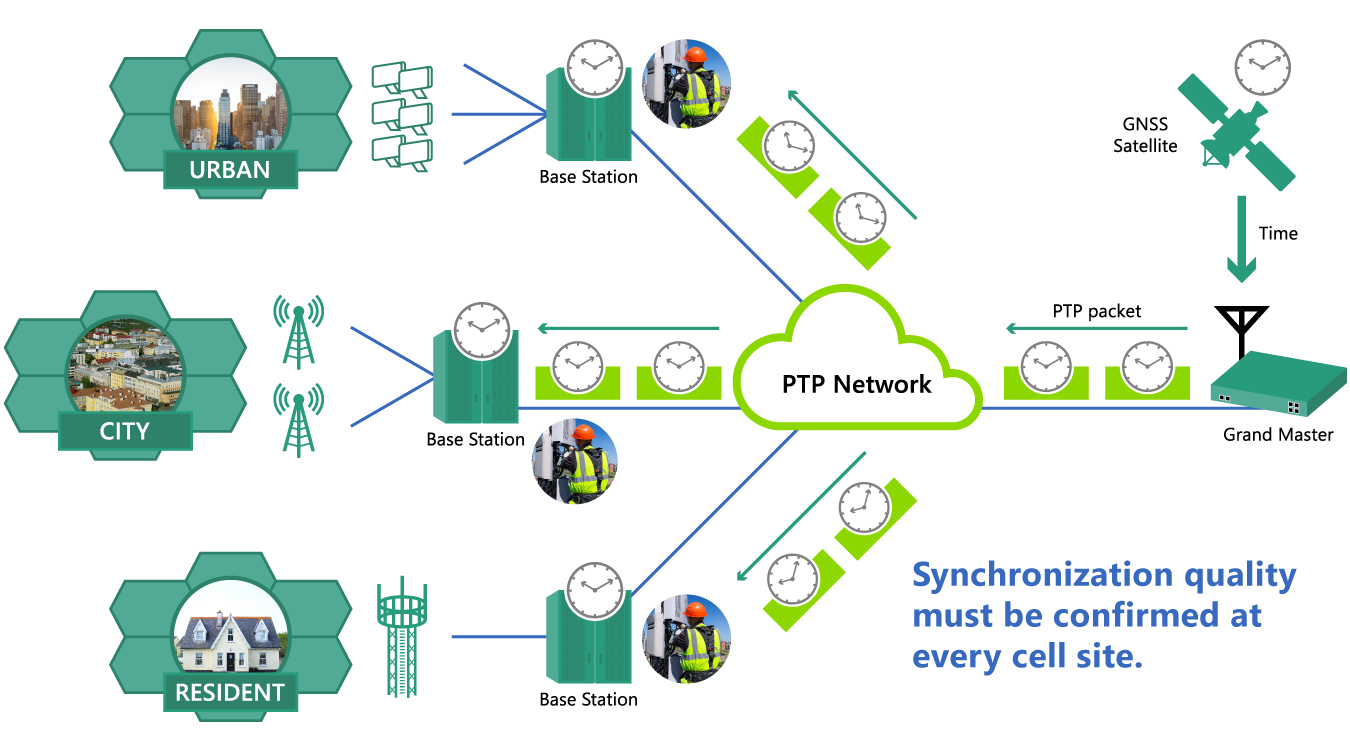
In typischen Sync-E-Architekturen ist ein primärer Referenz-Taktgeber (PRTC) an einer von drei Positionen angeordnet, entweder im Core-Netzwerk, an Multi-Service-Zugangspunkten oder an Übergangspunkten zum Festnetz, welche sich näher an den Geräten des Kunden befinden. Vorausgesetzt, dass das Ethernet-Netzwerk-Equipment das Taktsignal übertragen kann, reduziert der Einsatz primärer Referenztaktgeber im Core-Netzwerk die Anzahl der Taktgeber und erleichtert so die Aufrechterhaltung der Netzsynchronisation. Sind die primären Referenztaktgeber näher am Kunden platziert, so kann dies die Anzahl der Taktgeber erhöhen und es ist möglich, mehr als einen Taktgeber zu „sehen“. Die Bestimmung des primären Referenztaktgebers erfordert Informationen über den Status des Taktgebers, sowie dessen Genauigkeit und Typ. Eine Synchronisations-Statusmeldung (SSM) mit Informationen über den Stratum-Takttyp und seine Qualitätsstufe ist Bestandteil eines Ethernet Synchronization Messaging Channel (ESMC). Nach ITU-T G.8264 muss der ESMC in regelmäßigen Abständen, in der Regel einmal pro Sekunde, übertragen werden; er liefert die zur Gewährleistung einer guten Synchronisierung erforderlichen Informationen. Bei einer Änderung der Qualitätsstufe wird zur Ankündigung der Änderung sofort ein ESMC gesendet. Die Kontrolle, ob die korrekten Qualitätsstufen in regelmäßigen Abständen im ESMC übermittelt werden, ist von entscheidender Bedeutung, da ein Fehler in dieser Kommunikation zu einem Ausfall des Netzes führen kann. PTPSync E berücksichtigt nur die Frequenzsynchronisation, während moderne Kommunikationssysteme wie 5G auch Zeit- und Phasensynchronisation benötigen. Das Precision Time Protocol (PTP) deckt diese Anforderungen ab. PTP verteilt synchronisierte Zeitsignale an Netzwerkgeräte und ermöglicht kleine Korrekturen des berechneten Zeitfehlers (Time Error, TE). Es kommt in vielen Anwendungen zum Einsatz, darunter in der Telekommunikation und im Mobilfunk, wo die Synchronisationsqualität in jeder Funkzelle bestätigt werden muss.
Bild 4 - Beispiel einer PTP-Verteilung
Nicht alle Anwendungen erfordern das gleiche Maß an Genauigkeit, daher bieten verschiedene PTP-Profile geeignete Standarddefinitionen für unterschiedliche Anwendungen. Für PTP in Telekommunikationsnetzen gibt es zwei Profile. G.8275.1 kommt für die Phasen-/Zeitsynchronisation mit voller Timing-Unterstützung durch das Netz zum Einsatz und setzt den Einsatz von Boundary Clocks oder Transparent Clocks in jedem Knoten voraus. G.8275.2 unterstützt die Synchronisation, bei der nur ein teilweises Timing vom Netzwerk aufrechterhalten werden kann. Es beschreibt die Übertragung des PTP-Timings, wenn die Netzwerkausrüstung keine synchronisierten Daten weiterleiten kann, z. B. wenn eine Takt-Pufferung erfolgt. Das Protokoll besteht aus einer Reihe von Paketen, welche zeitbezogene Informationen übertragen und damit die Grundlage für eine eventuell erforderliche TE-Korrektur bilden. Jeder Netzabschluß steht in einer hierarchischen Primär-/Sekundär-Beziehung mit anderen Taktgebern des Netzwerks, mit dem Referenz-Primärtaktgeber (T-GM) an der Spitze der Hierarchie. Die meisten Betreiber nutzen einen zweistufigen PTP-Modus, der sich vom einstufigen durch eine Follow-Up-Nachricht unterscheidet (siehe unten).
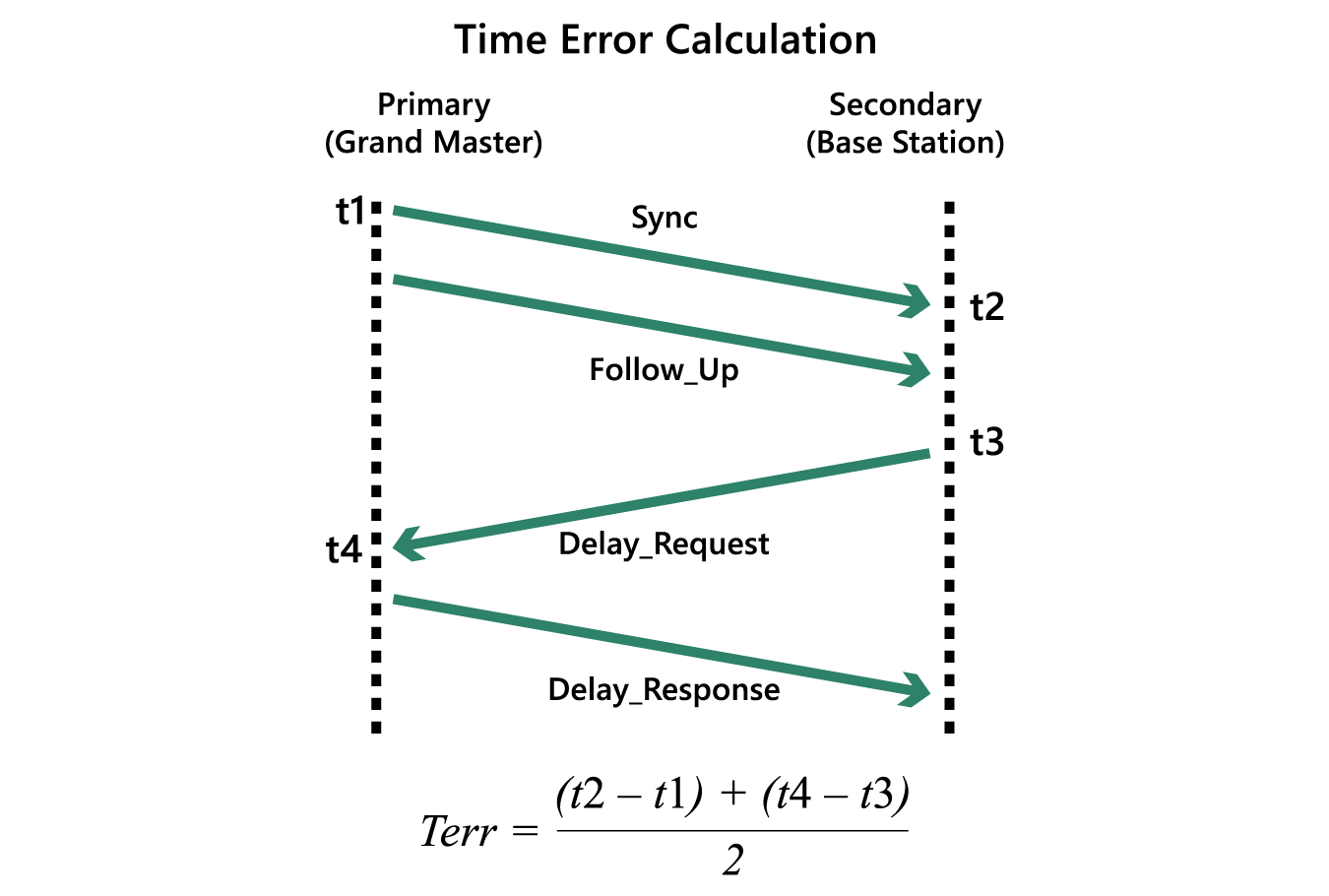
Bild 5 - Nachrichtenfluss des zweistufigen PTP-Protokolls
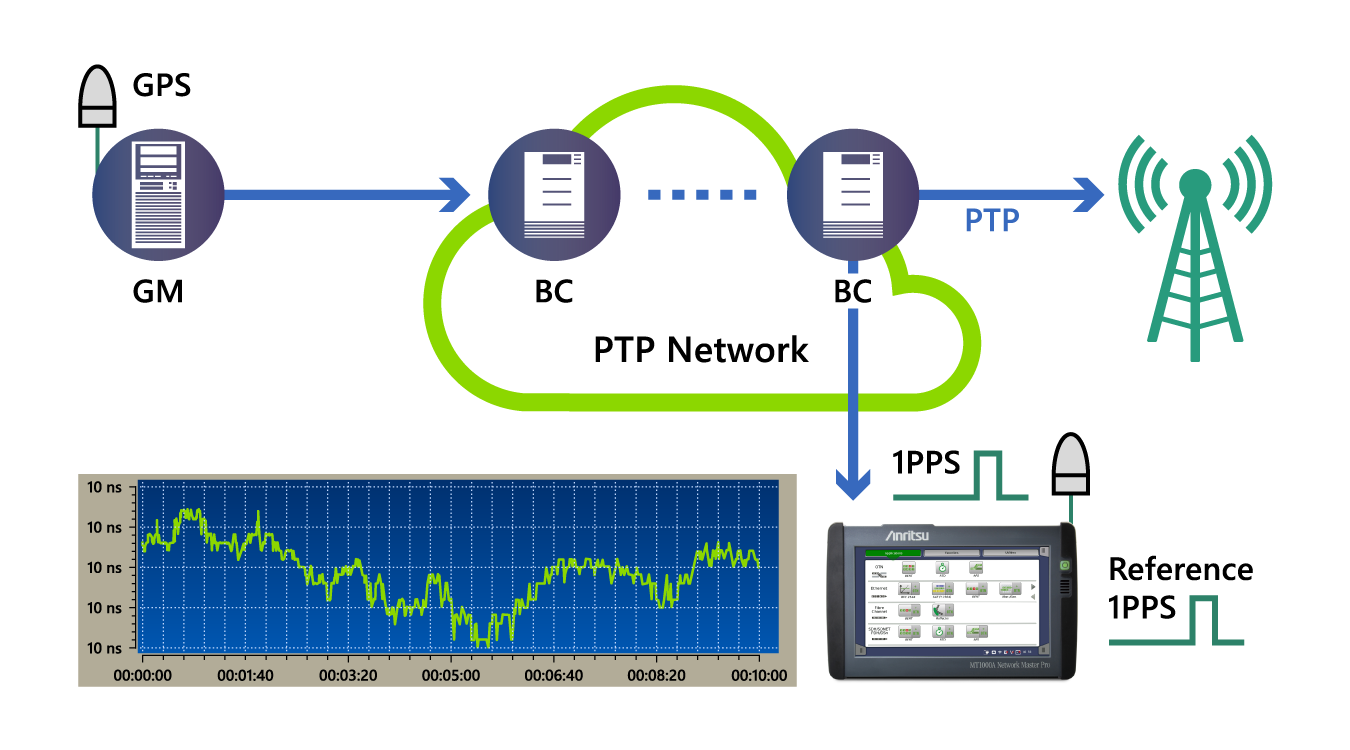
Der vom Primär-Taktgeber erfasste "Time of Day" wird von diesem in einer „Sync“-Nachricht an den Sekundär-Taktgeber gesendet. Danach sendet der Primär-Taktgeber eine „Follow Up“-Nachricht mit einem Hardware-Zeitstempel, welcher die genaue Sendezeit der vorherigen Sync-Nachricht angibt. Der Sekundär-Taktgeber nutzt diese Nachricht zur Synchronisierung seiner aktuellen Zeit. Anschließend sendet der Sekundär-Taktgeber einen „Delay Request“ an den Primär-Taktgeber. Unmittelbar nach Erhalt der „Delay Request“ verschickt der Primär-Taktgeber eine „Delay Response“, in welcher er dem Sekundär-Taktgeber den genauen Empfangszeitpunkt der „Delay Request“ – Nachricht mitteilt. Daraufhin berechnet der Sekundär-Taktgeber aus der Differenz zwischen den Meldungen „Delay Request“ und „Delay Response“ die Round-Trip-Verzögerung. Der Sekundär-Taktgeber stellt nun seine eigene Zeit ein und synchronisiert sich so mit dem Primär-Taktgeber. Sobald beide Taktgeber auf eine Sekunde genau übereinstimmen, fordert der Primär-Taktgeber den Sekundär-Taktgeber zur Frequenzanpassung auf, um die Genauigkeit zu halten. 1PPSEin vom Globalen Navigationssatellitensystem (GNSS) disziplinierter (mit GNSS synchronisierter) Grand Master Clock (T-GM) agiert als primärer Referenz- Taktgeber (PRTC) und liefert die Referenzzeit für die Synchronisierung des restlichen Netzes. Die Referenzzeit, die den Empfänger erreicht, wird durch die Ausbreitungsverzögerung über das Antennenkabel von der GNSS-Antenne beeinflusst. Der T-GM kompensiert die Ausbreitungsverzögerung des Antennenkabels mit etwa fünf Nanosekunden pro Meter. Ein T-GM liefert in der Regel eine separate, präzise 1PPS-Zeitreferenz (1 Pulse Per Second). Diese bezieht sich direkt auf Frequenz und Phase des Taktgebers. Sie lässt sich messen, um zu bestätigen, dass das T-GM korrekt arbeitet und eingerichtet ist. Es empfiehlt sich, zunächst die 1PPS-Messungen durchzuführen, da ein Fehler im T-GM dazu führen würde, dass das gesamte Netz nicht mehr synchron ist.
Bild 6 - Beispiel für ein 1PPS-Ergebnis
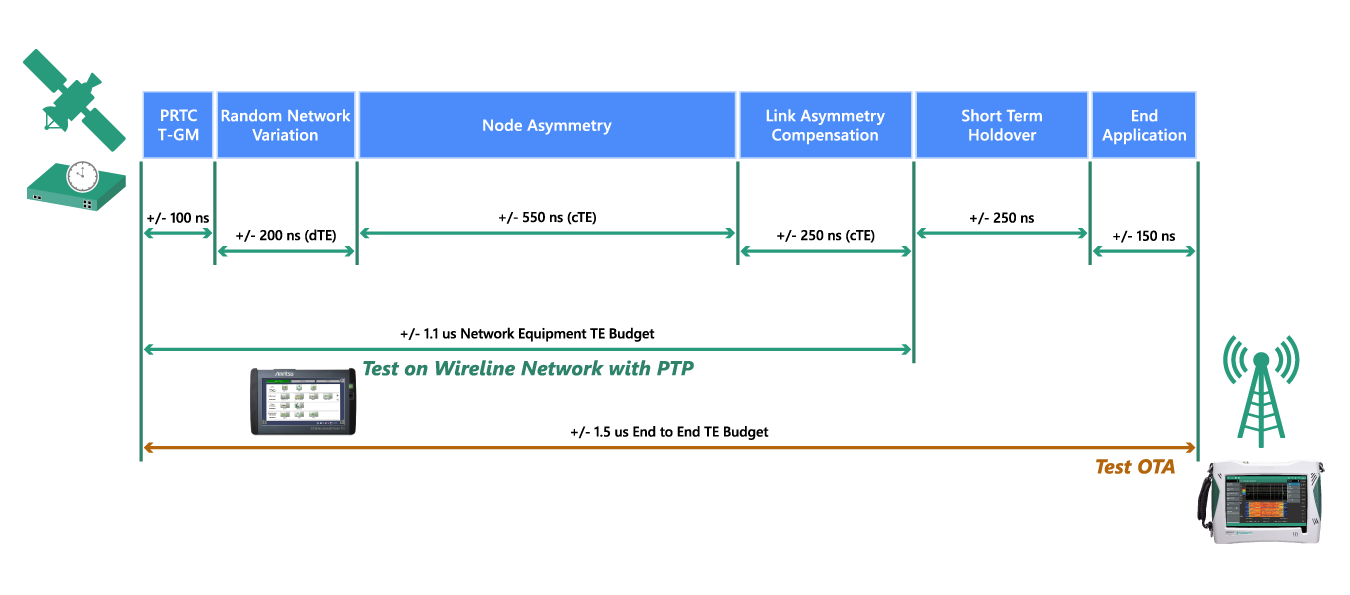
ZeitbudgetDer Zeitfehler (TE – time error) akkumuliert sich auf, während sich das Taktsignal vom primären Referenztaktgeber (PRTC) durch das Netz bewegt. Die Norm ITU-T G.8271.1 definiert Obergrenzen für den TE, wobei Toleranzen für verschiedene Stufen des Netzes vorgesehen sind.
Bild 7 - TE-Obergrenzen nach ITU-T G.8271.1-Norm
Ein Budget von 400 Nanosekunden ist reserviert für:
Dieses muss von der maximal erlaubten Obergrenze von 1.5µs zwischen dem PRTC und dem Endgerät abgezogen werden, so dass der maximale Zeitfehler zwischen PRTC und Antenne maximal 1,1µs betragen darf. Das obige Diagramm zeigt, wie das TE-Budget über das Netz zugewiesen wird. Eine Over-the-Air-Messung des TE ergibt einen Gesamt-TE für die gesamte Installation. Für ein zuverlässiges Management des TE-Budgets ist es jedoch notwendig, mit Geräten zu testen, welche integrale Komponenten des Netzwerks emulieren. SynchronitätstestDie Prüfung der Synchronität in mobilen Backhaul-Netzen erfordert Messgeräte mit einer internen Taktquelle, die auf GNSS abgestimmt und im einstelligen Nanosekunden-Bereich genau sind. In der Regel kommt ein Rubidium- oder Cäsium-Oszillator zum Einsatz. Das Messgerät muss dann das Netzwerk-Equipment emulieren, um die Sync-E- und PTP-Timing-Funktionen sowohl im Primär- als auch im Sekundär-Modus zu testen.
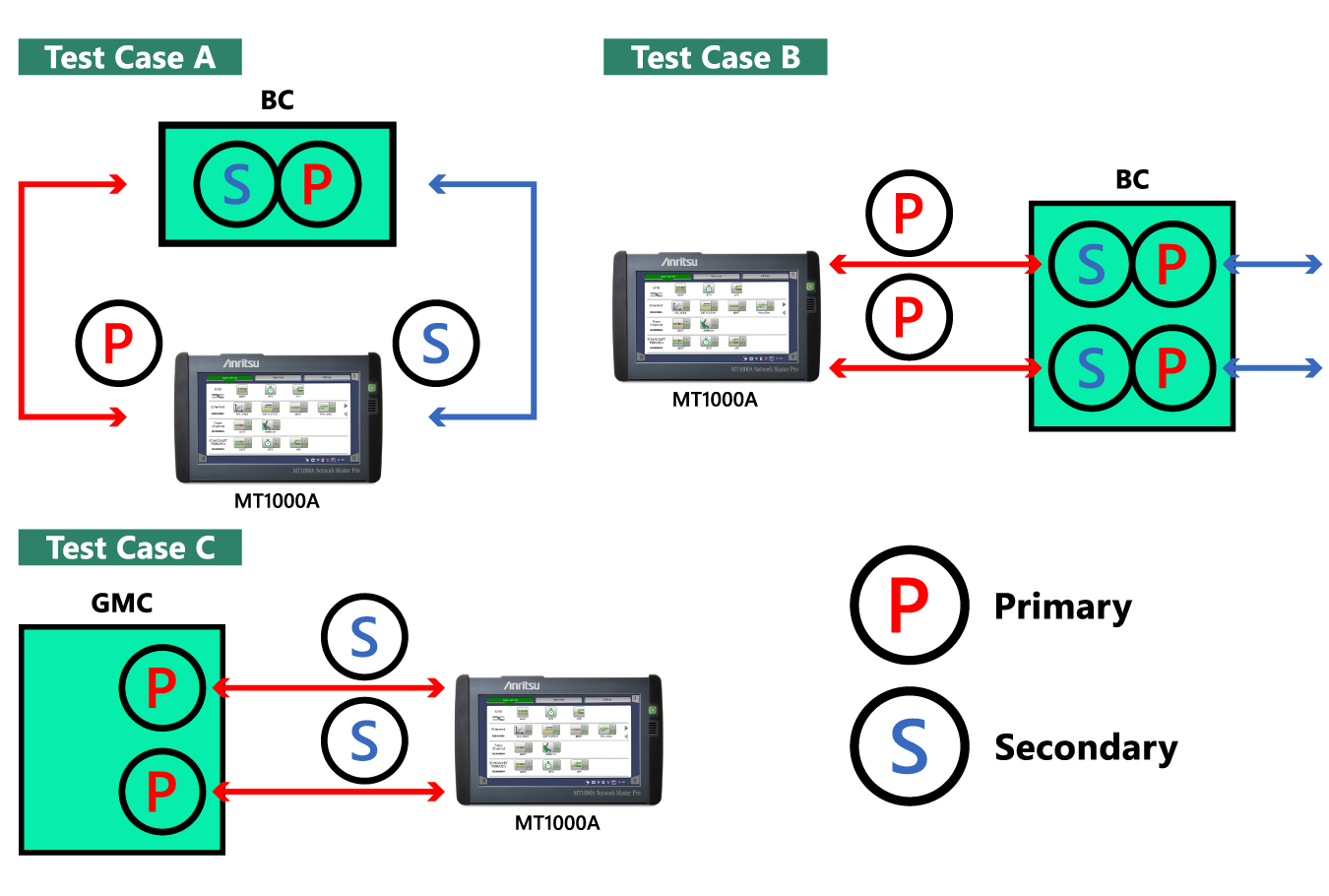
Bild 8 - Testfall Primär/Sekundär-Taktgeber-Anwendungen
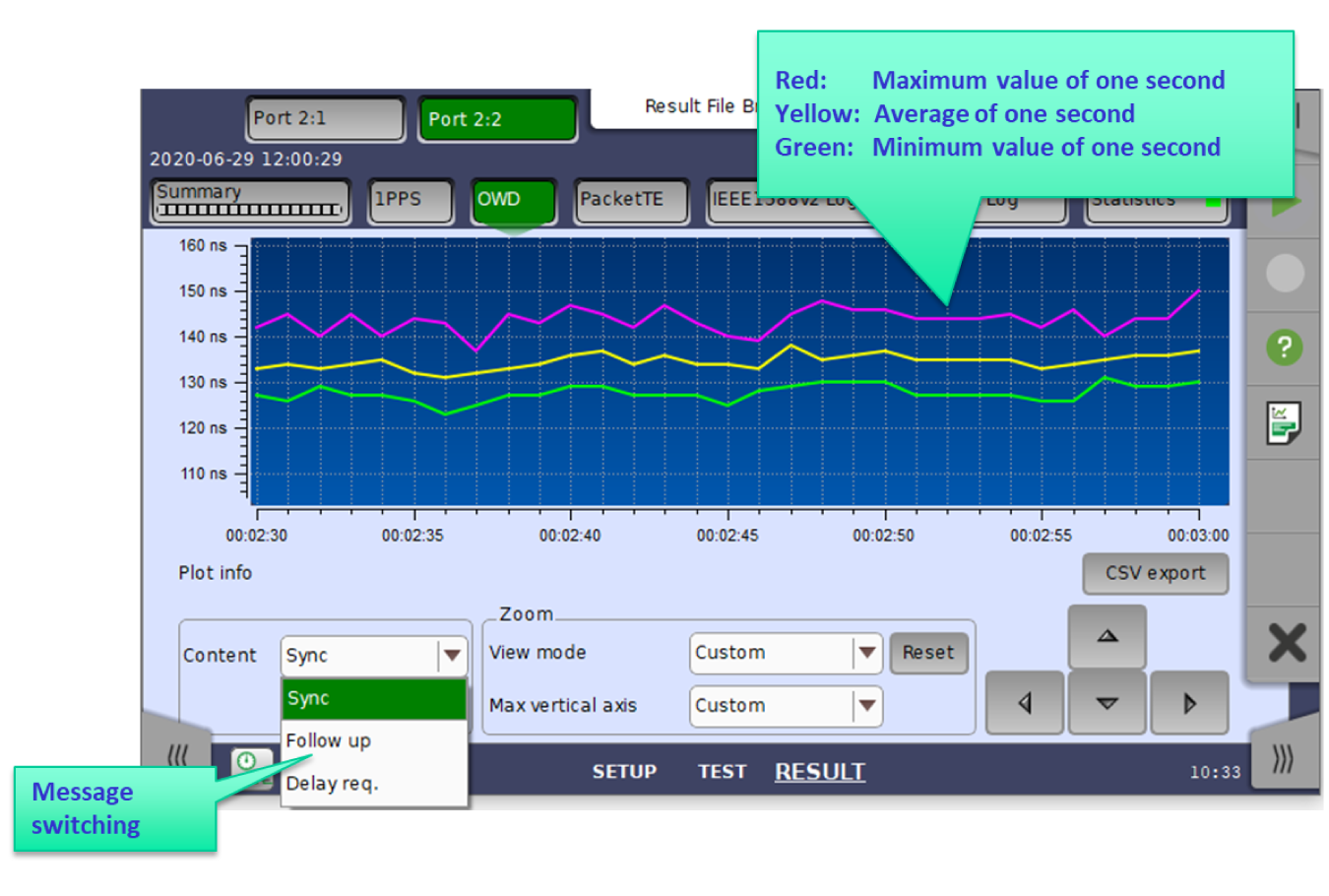
Im Testfall „A“ emuliert das Messgerät mit einem Port den Primär-Taktgeber, während es gleichzeitig auf dem zweiten Port im Sekundär-Modus die Synchronisierung des Prüflings bzw. des Netzes misst. Liegen diese Anschlüsse weit voneinander entfernt, kann man zwei Messgeräte verwenden, wobei beide Geräte mit GNSS synchronisiert werden. Im Testfall „B“ sind beide Ports so eingestellt, dass sie den Primär-Taktgeber emulieren, was während der Netzwerkinstallation oder in einem Labor, wo ein primärer Referenztakt nicht leicht zugänglich ist, nützlich sein kann. Nach Abschluss der Netzwerkinstallation und der Zeitsynchronisation durch den Primär-Taktgeber muss man die Synchronisation im gesamten Netzwerk testen, wobei man zunächst prüft, ob die richtigen Einstellungen für den Primär-Taktgeber eingegeben wurden. Danach erfolgt ein Test der Zeitverwaltungsprozesse, um festzustellen, ob diese korrekt funktionieren und ob Frequenz, Phase und Zeit gemäß den Standards synchronisiert sind. Dies ist in Testfall „C“ zu sehen. OWDZur Durchführung von Sync-Messungen emuliert der Tester den Sekundär-Taktgeber und lässt den Systemtakt als Primär-Taktgeber fungieren. Das Messgerät berechnet die Zeitdifferenz zwischen der gesendeten und der empfangenen PTP-Nachricht anhand der genauen Zeitstempel in den PTP-Paketen. Dies entspricht der Einwegverzögerung (One-Way-Delay - OWD). Die Echtzeit-OWD wird für jede Sync-, Follow-Up- und Delay-Request-Nachricht berechnet. Das dargestellte Ergebnis entspricht einer typischen PTP-Wiederholungsrate von 16-mal pro Sekunde und ist über die Zeit aufgetragen. Die Wiederholrate lässt sich netzwerkabhängig modifizieren.
Bild 9 - OWD Ergebnis-Bildschirm
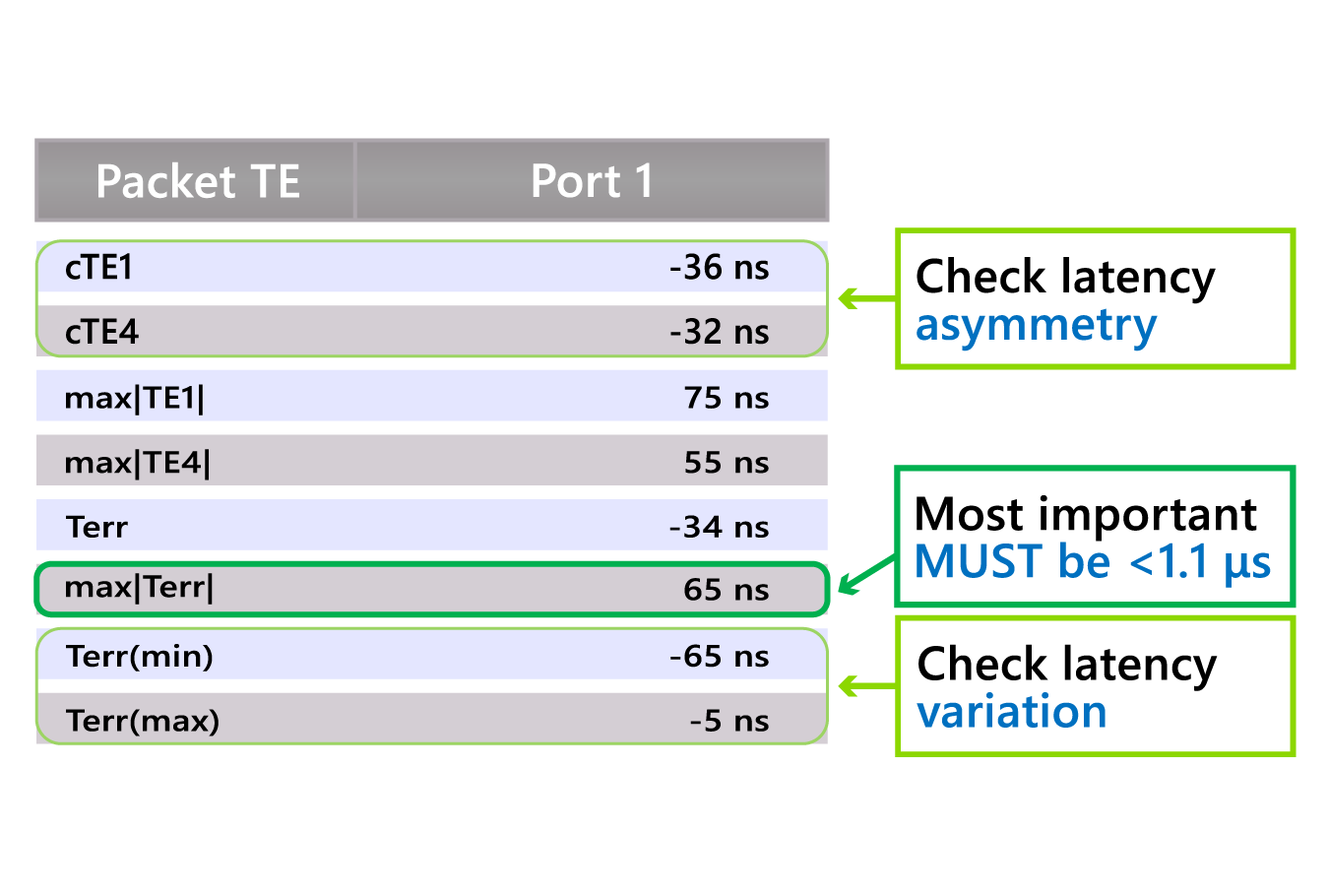
Im oben gezeigten Screenshot des Messgeräts zeigt die rote Linie den Maximalwert der 16 PTP-Zyklen, die grüne Linie den Minimalwert und die gelbe Linie den berechneten Durchschnittswert für alle 16 Zyklen im Laufe dieser Sekunde. Die Ergebnisse werden aufgezeichnet und lassen sich zur weiteren Analyse auch im CSV-Format exportieren. Der OWD über die Sync- und Delay-Request-Nachrichten enthält die Ausbreitungsverzögerung der Ethernet-Kabel, welche etwa fünf Nanosekunden pro Meter ausmacht, und zur Messung hinzugefügt wird. Daher werden die konstanten Paketzeitfehler cTE1 und cTE4 aus dem Ergebnis der OWD abzüglich der Ausbreitungsverzögerung des Ethernet-Kabels berechnet. Packet Time Error Überblicksanzeige
Bild 10 - PTP-Ergebnisse - Überblick
Eine zusammenfassende Anzeige der wichtigsten Ergebnisse erlaubt eine schnelle Überprüfung des Zustands der Synchronisierung und liefert Hinweise auf mögliche Probleme. Der wichtigste Wert ist der maximale Zeitfehler, max|Terr| für den Worst Case. Die konstanten Zeitfehler cTE1 und cTE4 sind in jeder Richtung gleich der Latenz und geben einen Überblick über die Asymmetrie; hier sollte man fast identische Werte sehen. IEEE 1588v2 Überblicksanzeige
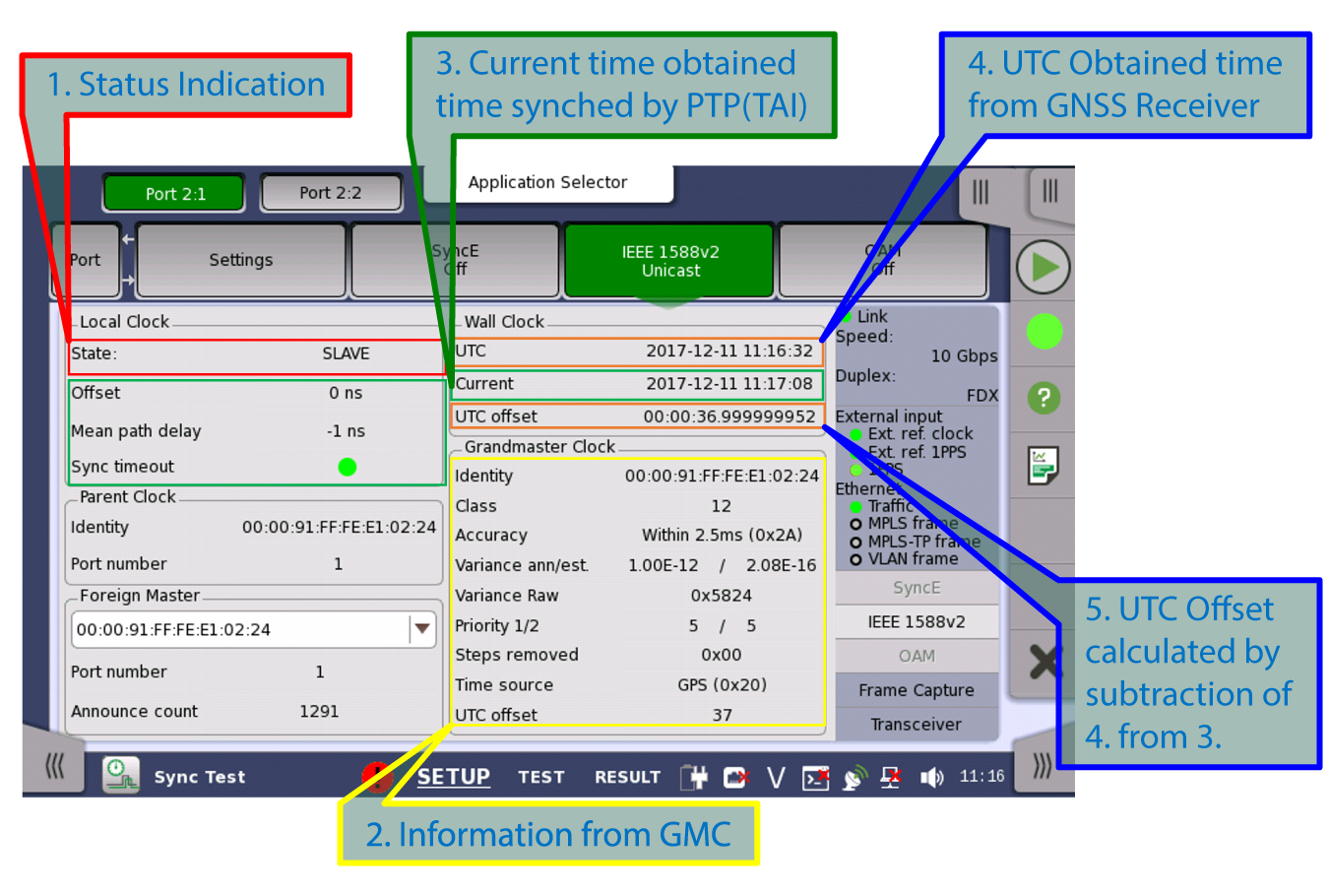
Bild 11 - IEEE 1588v2 Überblicksanzeige
Die IEEE 1588v2-Überblicksanzeige des Testers liefert erfasste Informationen über verschiedene Taktgeber im Netzwerk. Er zeigt die MAC-Adressen verschiedener, lokaler und entfernter Primär-Taktgeber an. So kann überprüft werden, ob die Zeit aus der richtigen Quelle stammt. Weitere Informationen über den Primär-Taktgeber, dessen Klasse, Priorität, Genauigkeit usw. werden angezeigt. Der Status des lokalen Taktgebers, dessen Offset und die mittlere Pfadverzögerung verifizieren die Synchronisierungs-Güte, wobei eine grün leuchtende Sync Timeout-LED anzeigt, dass der lokale Taktgeber mit dem Referenz-Primärtaktgeber synchronisiert ist. Für genaue Ergebnisse muss eine Korrektur für den aktuellen Universal Time Clock (UTC) vorgenommen werden. Eine PRTC muss auf UTC korrigiert werden, die aktuelle Abweichung beträgt 37 Sekunden - die korrekte Einstellung ist zu überprüfen. Autor: Andrew Cole, Applikationsingenieur, Anritsu www.anritsu.com/ Weitere News zum Thema: |

Aktuelle Termine Weitere Veranstaltungen...
Tag CloudBoundary Scan
* JTAG
* Funktionstest
* Oszilloskop
* AOI-Test
* PXI
* Automotive
* EMV-Messtechnik
* Inspektion
* Röntgeninspektion
* In-Circuit-Test
* Batterietest
* LXI
* Stromversorgung
* Flying
* Photovoltaik
* LTE
* CAN
* Solarzellen
* Handheld
* Netzwerkanalysator
* Emulation
* ICT
* SPI
* Schaltmodul
* Leistungsmessung
* Spektrumanalysator
* FlexRay
* USB
* Traceability
* Manufacturing Execution System
* Testadapter
* Flying Prober
* Steuergerät
* |
||
|
© All about Test seit 2009 |
||||
 How to resolve AdBlock issue?
How to resolve AdBlock issue?